Polski | English
"APEX DYNAMICS"
Reprezentacja WMiIT w konkursie "IBM AI Racing League"
| Przełamanie bariery 1:20! | 18/06/2026 |
Nie zatrzymaliśmy się na wyniku 1:40! Zespół APEX DYNAMICS z radością informuje, że nasz autonomiczny bolid ukończył tor Corkscrew w czasie poniżej 1 minuty i 20 sekund.
Jak udało się urwać kolejne sekundy? Pozostaliśmy wierni naszej filozofii „Dwa mózgi są lepsze niż jeden” i dopracowaliśmy proces optymalizacji do granic możliwości. Uruchamianie symulacji TORCS z prędkością 128x pozwoliło naszemu zautomatyzowanemu „inżynierowi wyścigowemu” (Optuna) przetestować tysiące kombinacji parametrów jazdy w rekordowo krótkim czasie, znajdując idealny kompromis między maksymalną prędkością a stabilnością pokonywania zakrętów.
Aby zachować pełną zgodność z fizyką symulacji, każde rekordowe okrążenie wygenerowane w przyspieszonym tempie było rygorystycznie weryfikowane przy standardowej prędkości 1x. Od pierwszych okrążeń na poziomie 2:20 do tego imponującego kamienia milowego – nasz wirtualny drapieżnik jest dziś szybszy i bardziej niezawodny niż kiedykolwiek wcześniej.
Finały są już tuż za rogiem!
| Mamy to! Bariera 1:40 została złamana | 13/05/2026 |
Z dumą ogłaszamy kolejny wielki sukces zespołu APEX DYNAMICS! Dzięki wdrożeniu frameworka Optuna do automatycznej optymalizacji parametrów naszego kontrolera, udało nam się wykręcić rewelacyjny czas 1:40 na wymagającym torze Corkscrew.
Nasz proces przeszedł na wyższy poziom – zamiast uczyć bota jazdy od zera, zaczęliśmy precyzyjnie „stroić” kierowcę. Wykorzystaliśmy symulacje przyspieszone 128-krotnie, testując setki konfiguracji parametrów skrętu i hamowania. Każdy rekordowy przejazd rygorystycznie walidowaliśmy w normalnym tempie (1x), by wykluczyć błędy fizyki. Przekształciliśmy nieprzewidywalne AI w mierzalne zagadnienie optymalizacyjne, co daje nam ogromną przewagę przed finałem!

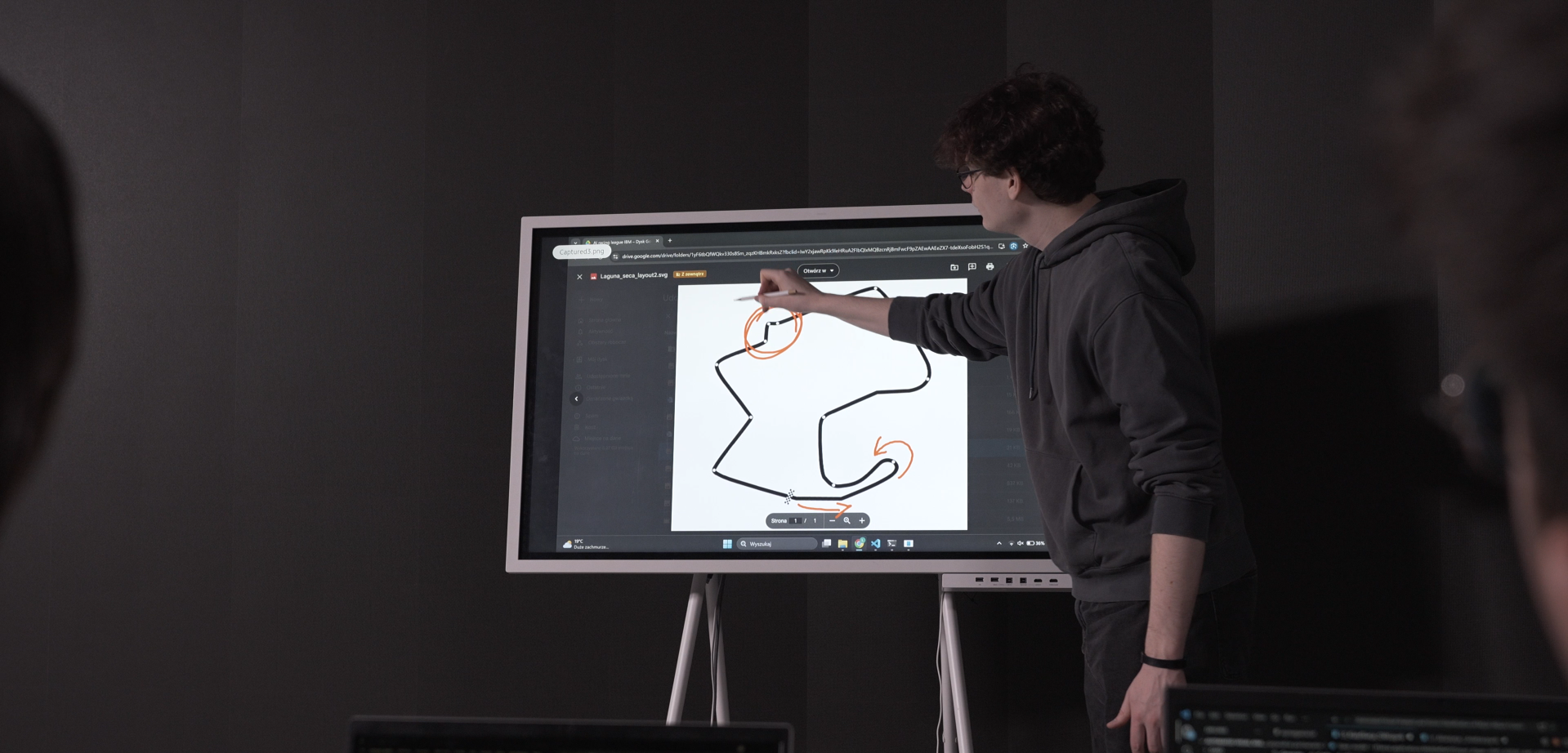
| Inżynieria w obiektywie kamery: Kulisy produkcji materiału APEX DYNAMICS | 30/04/2026 |
Zaawansowane rozwiązania technologiczne wymagają odpowiedniej oprawy. Aby w pełni oddać skalę naszego projektu i zaprezentować zmagania z algorytmami autonomicznej jazdy, zespół APEX DYNAMICS przeniósł się na chwilę z laboratorium do profesjonalnego studia nagraniowego. Przygotowujemy materiał wideo, który krok po kroku udokumentuje naszą drogę – od pierwszych problemów z uczeniem ze wzmocnieniem po ostateczny sukces optymalizacyjny.
Do realizacji podeszliśmy z taką samą rygorystyczną precyzją, jak do pisania kodu. Wykorzystaliśmy kinowe oświetlenie oraz zaawansowane techniki montażu w środowisku DaVinci Resolve. W materiale łączymy techniczne wypowiedzi członków naszego zespołu z wizualizacją surowej telemetrii oraz dynamicznymi nagraniami z symulatora TORCS.
Wierzymy, że profesjonalizm mierzy się nie tylko jakością stworzonego algorytmu, ale również umiejętnością jego czytelnej i bezkompromisowej prezentacji. Zależało nam, aby jakość wideo odzwierciedlała precyzję środowiska IBM Granite oraz frameworka Optuna, na których pracowaliśmy. Efekty naszej pracy po obu stronach kamery zaprezentujemy już wkrótce!

| Przełom w architekturze – od „ślepej” nauki do precyzyjnego sterowania | 23/04/2026 |
Za nami kluczowy etap prac, który przyniósł fundamentalną zmianę w naszym podejściu. Choć początkowo stawialiśmy na Reinforcement Learning i model Soft Actor-Critic, zderzyliśmy się z problemem „reward hacków” – nasz agent znajdował luki w systemie nagród, wybierając kolizje zamiast poprawnej jazdy.
Dzięki wsparciu merytorycznemu z kursów IBM SkillsBuild oraz burzy mózgów przeprowadzonej z modelem IBM Granite, podjęliśmy odważną decyzję o zmianie strategii. Odeszliśmy od nieprzewidywalnej eksploracji na rzecz kontrolera regułowego (rule-based) opartego bezpośrednio na czujnikach TORCS. To rozwiązanie dało nam pełną kontrolę nad gazem, kierownicą i techniką trail brakingu, tworząc stabilną bazę do walki o najwyższe lokaty. Prace nabierają nowej jakości!
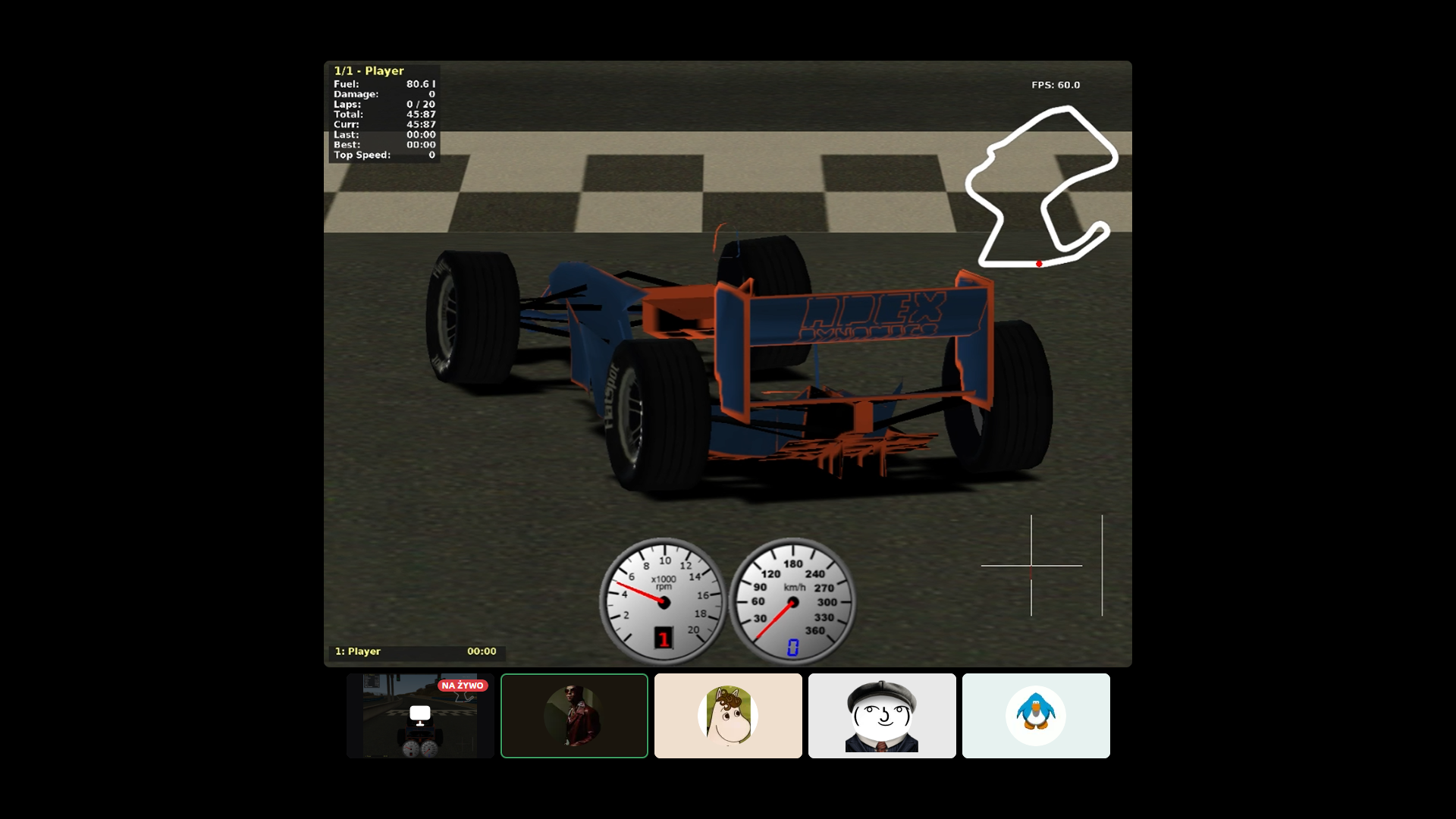
| Przekraczamy linię mety: czas 2:20 i rozproszona moc obliczeniowa! | 17/04/2026 |
Za nami kolejne, intensywne spotkanie robocze, które tym razem przeprowadziliśmy w naszym wirtualnym garażu na platformie Discord. Mamy świetne wieści prosto z toru! Nasz model autonomiczny z sukcesem zamknął pełne okrążenie bez wypadnięcia z trasy, osiągając stabilny czas 2:20. To nasz pierwszy, niezwykle ważny punkt odniesienia, który udowadnia, że nasza początkowa koncepcja działa w praktyce.
Nie zamierzamy jednak na tym poprzestać. Aby urwać kolejne sekundy z czasu okrążenia, wdrażamy nową strategię: równoległe trenowanie modelu na kilku komputerach jednocześnie. Ta rozproszona moc obliczeniowa pozwoli nam znacznie szybciej testować i optymalizować parametry jazdy.
Intensywnie wykorzystujemy modele IBM Granite do gromadzenia nowych pomysłów, burzy mózgów oraz szukania nieszablonowych rozwiązań w kodzie.
Równolegle z pracami nad sztuczną inteligencją, skupiliśmy się na naszej tożsamości wizualnej. Powstał już wstępny projekt malowania naszego bolidu! Chcemy mieć pewność, że APEX DYNAMICS będzie nie tylko szybki, ale i dumnie będzie reprezentował barwy WMiIT na torze. Prace nabierają tempa!

| Zarejestrowani i gotowi do pracy! | 30/03/2026 |
Zgłosiliśmy się i zostaliśmy zarejestrowani w konkursie pod nazwą APEX DYNAMICS! Jako drużyna z Wydziału Matematyki i Informatyki Technicznej Politechniki Lubelskiej jesteśmy gotowi do działania. Rozpoczynamy naszą przygodę z wyścigami AI i stawiamy pierwsze kroki w tej rywalizacji. Kolejnym etapem będzie szczegółowe zapoznanie się ze środowiskiem wyścigowym, a równolegle podejmujemy pierwsze prace nad naszymi rozwiązaniami.

| Dyskusja nad koncepcją | 26/03/2026 |
Pomału obieramy kierunek naszych działań i doprecyzowujemy koncepcję pracy zespołu. Nasze podejście opiera się na haśle „Dwa Mózgi Zamiast Jednego”. Zakładamy połączenie dwóch ról: „Kierowcy Wyścigowego” oraz „Inżyniera Wyścigowego”. Takie podejście pozwoli nam lepiej analizować sytuację i podejmować trafniejsze decyzje. Konsekwentnie rozwijamy tę koncepcję w ramach przygotowań do AI Racing League.
| Spotkanie organizacyjne | 19/03/2026 |
Spotkaliśmy się na pierwszym spotkaniu zespołu, podczas którego opiekun programu IBM SkillsBuild przedstawił koncepcję zawodów. Spotkanie było bardzo owocne – pojawiło się wiele pytań i cennych dyskusji. Dzięki uzyskanym odpowiedziom lepiej zrozumieliśmy zasady oraz środowisko rywalizacji. Pozwoliło nam to uporządkować dalsze działania i kierunki pracy.
Jesteśmy więc gotowi, aby podjąć wyzwanie w AI Racing League!

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego, Program Operacyjny Wiedza Edukacja Rozwój 2014-2020 "PL2022 - Zintegrowany Program Rozwoju Politechniki Lubelskiej" POWR.03.05.00-00-Z036/17
