Polski | English
"APEX DYNAMICS"
Representation of the Faculty of Mathematics and Information Technology in the "IBM AI Racing League" Competition
| Breaking the 1:20 Barrier! | 18/06/2026 |
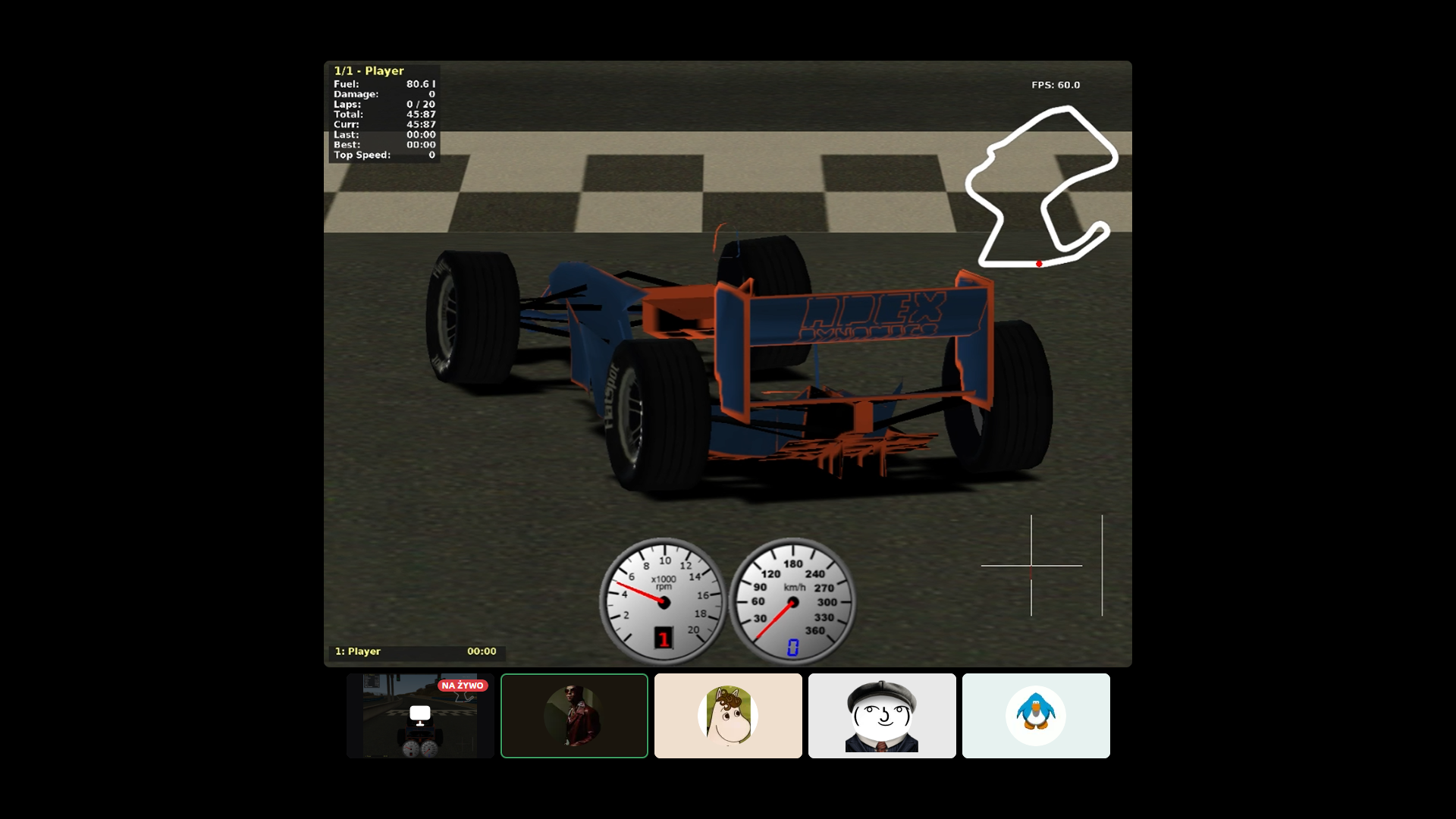
We didn't stop at 1:40! The APEX DYNAMICS team is thrilled to announce that our autonomous bot just finished the Corkscrew track in under 1 minute and 20 seconds.
How did we shave off so much time? By sticking to our "Two Brains Are Better Than One" philosophy and pushing our optimization to the absolute limit. Running the TORCS simulation at 128x speed allowed our automated "Race Engineer" (Optuna) to test thousands of driving parameter combinations in record time, finding the perfect balance of speed and cornering stability.
To ensure authentic physics, every record-breaking lap generated in fast-forward was strictly validated at normal 1x speed. From our initial 2:20 laps to this massive new milestone, our virtual predator is faster and more reliable than ever.
The finals are just around the corner!
| We Did It! The 1:40 Barrier Has Been Broken | 13/05/2026 |
We are proud to announce another major success for the APEX DYNAMICS team! By implementing the Optuna framework for automated optimization of our controller parameters, we achieved an impressive 1:40 lap time on the demanding Corkscrew track.
Our development process has entered a new phase — instead of teaching the bot to drive from scratch, we focused on precisely fine-tuning the driver. We used simulations accelerated 128 times, testing hundreds of steering and braking parameter configurations. Every record-setting lap was rigorously validated at normal simulation speed (1x) to eliminate potential physics-related inaccuracies.
We transformed unpredictable AI behavior into a measurable optimization problem, giving us a significant competitive advantage ahead of the finals!

| Engineering Through the Camera Lens: Behind the Scenes of the APEX DYNAMICS Production | 30/04/2026 |
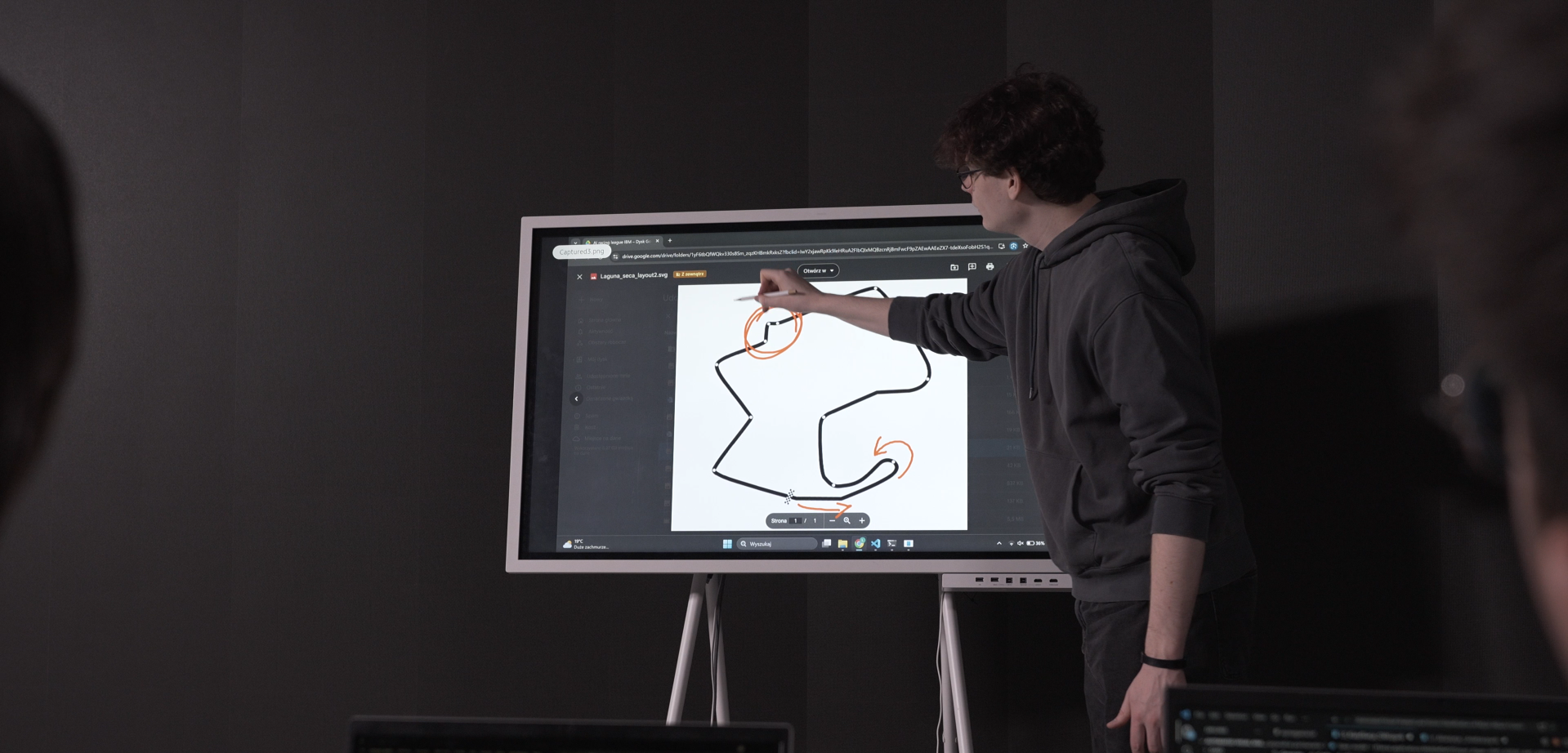
Advanced technological solutions deserve equally professional presentation. To fully capture the scale of our project and showcase our work on autonomous driving algorithms, the APEX DYNAMICS team temporarily moved from the laboratory to a professional recording studio. We are preparing a video that will document our journey step by step — from the initial challenges of reinforcement learning to our final optimization success.
We approached the production process with the same rigorous precision that we apply to software development. Using cinematic lighting and advanced post-production techniques in DaVinci Resolve, we combined technical commentary from our team members with raw telemetry visualizations and dynamic footage from the TORCS simulator.
We believe professionalism is measured not only by the quality of the developed algorithm, but also by the ability to present it clearly and effectively. Our goal was to ensure that the video quality reflects the precision of the IBM Granite environment and the Optuna framework on which we worked.
We will present the results of our efforts — both in front of and behind the camera — very soon!

| Architectural Breakthrough – From "Blind" Learning to Precise Control | 23/04/2026 |
We have completed a crucial stage of our work that resulted in a fundamental shift in our approach. Although we initially focused on Reinforcement Learning using the Soft Actor-Critic model, we encountered the problem of reward hacking — our agent discovered loopholes in the reward system, preferring collisions over proper driving behavior.
With support from IBM SkillsBuild training materials and brainstorming sessions assisted by the IBM Granite model, we made the bold decision to change our strategy. We moved away from unpredictable exploration and adopted a rule-based controller built directly on TORCS sensor data. This solution gave us full control over acceleration, steering, and trail braking techniques, creating a stable foundation for competing at the highest level.
Our work has entered an exciting new phase!
| Crossing the Finish Line: 2:20 Lap Time and Distributed Computing Power! | 17/04/2026 |
Another intensive working session is behind us, this time held in our virtual garage on Discord. We have exciting news straight from the track! Our autonomous model successfully completed a full lap without leaving the track, achieving a stable lap time of 2:20. This marks our first major milestone, proving that our initial concept works in practice.
However, we are not stopping there. To shave off additional seconds, we are implementing a new strategy: parallel model training across multiple computers simultaneously. This distributed computing approach allows us to test and optimize driving parameters much more efficiently.
We are also actively using IBM Granite models for brainstorming, generating new ideas, and exploring unconventional coding solutions. Alongside our AI development work, we also focused on our visual identity. The first concept for our race car livery has already been created! We want to ensure that APEX DYNAMICS is not only fast, but also proudly represents the colors of WMiIT on the track.
Momentum is building!

| Registered and Ready to Get to Work! | 30/03/2026 |
We officially registered for the competition under the name APEX DYNAMICS! As a team representing the Faculty of Mathematics and Information Technology at Lublin University of Technology, we are ready to begin. We are starting our journey in AI racing and taking our first steps in this exciting competition. The next stage will involve a detailed exploration of the racing environment, while simultaneously beginning work on our own technical solutions.

| Concept Development Discussion | 26/03/2026 |
We are gradually defining the direction of our work and refining our team concept. Our approach is built around the idea: "Two Brains Instead of One". We aim to combine two complementary roles: the "Racing Driver" and the "Race Engineer". This strategy allows us to analyze situations more effectively and make better decisions. We are consistently developing this concept as part of our preparation for the AI Racing League.
| Organizational Meeting | 19/03/2026 |
We held our first team meeting, during which the IBM SkillsBuild program coordinator introduced the concept and structure of the competition. The meeting was highly productive, generating many valuable questions and discussions. Thanks to the answers we received, we gained a much clearer understanding of both the competition rules and the technical environment. This helped us organize our next steps and define our working direction. We are ready to take on the AI Racing League challenge!

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego, Program Operacyjny Wiedza Edukacja Rozwój 2014-2020 "PL2022 - Zintegrowany Program Rozwoju Politechniki Lubelskiej" POWR.03.05.00-00-Z036/17
